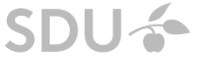
I denne opgave bruger vi en ultralydssensor til at måle afstanden hen til ting. Sensoren hedder HC-SRO4. På ultralydssensoren er der to rør, som vist på billedet.
Det ene rør bruges til at sende lydbølger ud (markeret med T for Transmitter) og det andet bruges til at modtage de samme lydbølger igen (markeret med R for Receiver). Lydbølgerne er ultrasoniske, dvs frekvensen er så høj, at man ikke selv kan høre dem. Sensoren virker ved, at man giver den et signal. Så sender den en lydbølge ud fra det ene rør. Hvis lydbølgen rammer en f.eks. en væg som er mellem 2 cm og 4 meter direkte foran ultralydssensoren, så vil lydbølgen blive reflekteret tilbage til modtagerrøret. Så vil sensoren outputte et elektrisk signal, som svarer til den tid, som det tog lydbølgen at blive sendt ud og komme tilbage igen. Da vi ved, hvad lydens hastighed er, så kan vi regne ud, hvor langt der var hen til væggen.
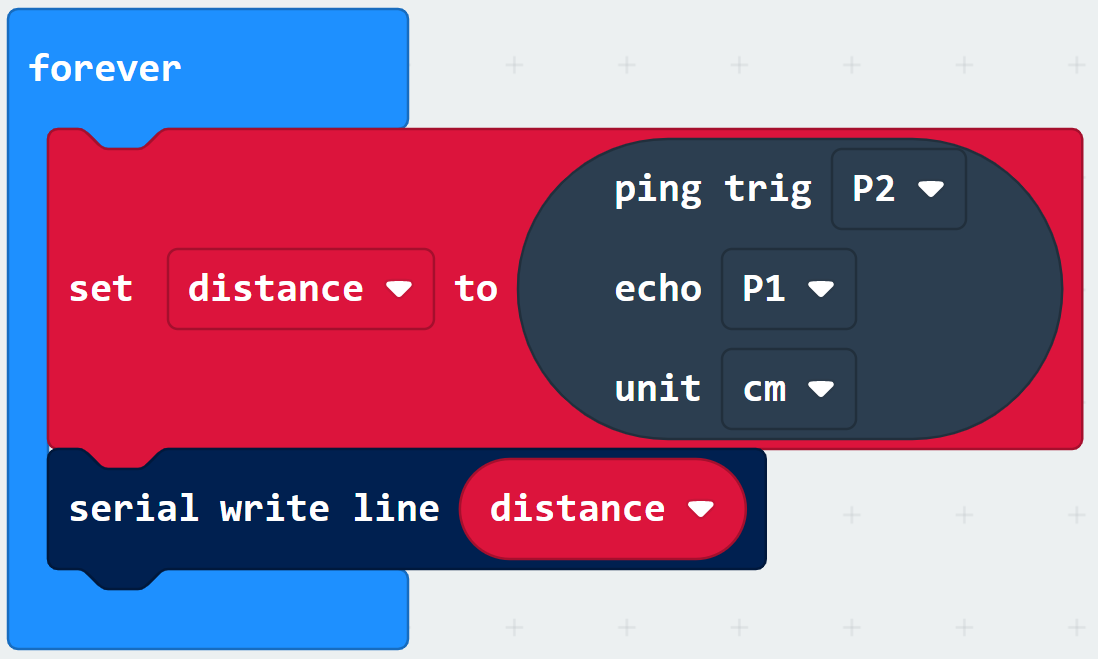
På sensoren er der 4 pins (kig på billedet ovenover). Vcc er sensorens forsyning og skal forbindes til 5 V. Den virker ikke så godt med 3.3 V, så det er vigtigt, at man forbinder til 5 V. Gnd er sensorens reference og skal forbindes til - på breadboardet. Trig er en pin, som bruges til at fortælle sensoren, at den skal starte en måling. Echo er den pin, som sensoren bruger til at fortælle, hvor lang tid det har taget lydbølgen at rejse frem og tilbage.

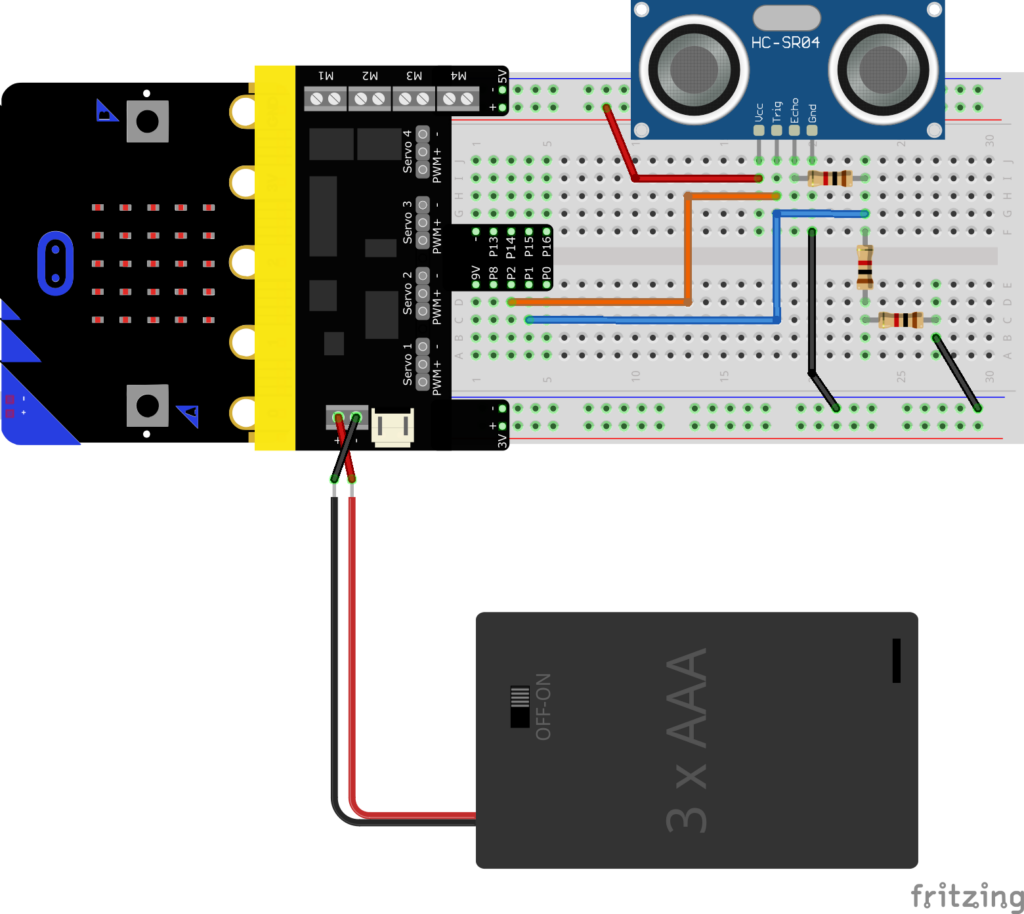
![\[ V_{grøn} = V_{rød} \cdot \frac{R_{2}+R_{3}}{R_{1}+R_{2}+R_{3}}\]](https://teknologiskolen.dk.flamingo.ws/wp-content/ql-cache/quicklatex.com-c730e423d350399c1fe86bf7d5258146_l3.png "Rendered by QuickLaTeX.com")
 og
og  og kontroller med en lommeregner, at resultatet bliver 3.3 V. Du kan også prøve med nogle andre værdier af modstande og stadigvæk få det samme resultat. Det vigtige ifølge formlen er bare forholdet imellem modstandene. Hvis du har en modstand med samme værdi som R2 + R3 kan du erstatte R2 og R3 med den.
og kontroller med en lommeregner, at resultatet bliver 3.3 V. Du kan også prøve med nogle andre værdier af modstande og stadigvæk få det samme resultat. Det vigtige ifølge formlen er bare forholdet imellem modstandene. Hvis du har en modstand med samme værdi som R2 + R3 kan du erstatte R2 og R3 med den.




![\[ Afstand\; [\textrm{cm}] = \frac{tid\; [ \mathrm{\mu} \textrm{s}]}{2} \cdot 0.0343\; \left[\frac{\textrm{cm}}{\mathrm{\mu} \textrm{s}}\right] \]](https://teknologiskolen.dk.flamingo.ws/wp-content/ql-cache/quicklatex.com-227ef6f031663807c2cc3ce6f515de7e_l3.png "Rendered by QuickLaTeX.com")
![\[ v_{luft} = 20.05 \cdot \sqrt{ t + 273,15 } \]](https://teknologiskolen.dk.flamingo.ws/wp-content/ql-cache/quicklatex.com-30e199dda8410e5f4073464f30a296a2_l3.png "Rendered by QuickLaTeX.com")
![\[ Afstand\; [\textrm{cm}] = \frac{tid\; [ \mathrm{\mu} \textrm{s}]}{2} \cdot v_{luft}\; \left[\frac{\textrm{cm}}{\mathrm{\mu} \textrm{s}}\right] \]](https://teknologiskolen.dk.flamingo.ws/wp-content/ql-cache/quicklatex.com-e6d0550483c3060a857f4eeb3f9dfdb8_l3.png "Rendered by QuickLaTeX.com")